Fully Flight Tested
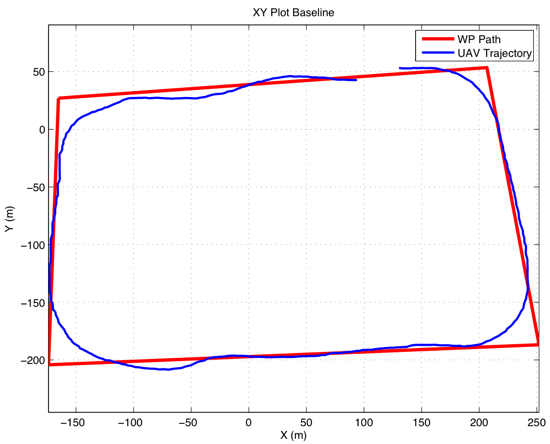
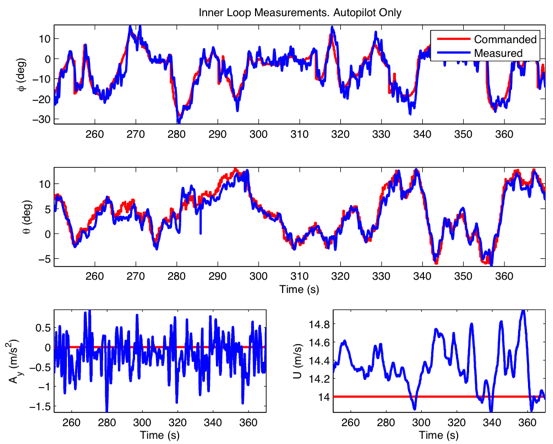
So after endless hours in the lab I am happy to report success in all fronts of the autopilot and making the GIT repository publicly available. The following plots show the XY plot of the Airplane as well as the autopilot’s inner loop response to commands from flight tests.
The full UAV system was thoroughly tested during the months of July and August, and, after squashing most of the bugs (you never end doing that) by mid August we had a sequence of very successful flights. We are now able to fly for all of our 25 minute battery time under full autonomous flight in the pattern configured from the ground station.
Several new videos have been posted on the videos section. One is a short video of the UAV under full autonomous control. Another shows the full feature set of the Ground Station software by replaying a telemetry file from a real flight. Finally the other is showing the failure tolerance (to rudder failures) built into the autopilot itself by using an L1 output feedback adaptive controller. We will be talking about that in later posts. We also updated all of our pictures sections to include the new autopilot hardware revision.
In the following weeks we’ll be posting more about the inner workings of the autopilot, failure tolerance and the ground station software. Of course meanwhile you are free to clone our GIT repository located at git://overtux.cse.ucsc.edu/malife/apcode.git (note that this is NOT a website but rather a GIT repository). As expected we can not offer technical support, but we can help you get started. If you want to contribute there is several fronts were we sure could use some help. Specially in putting some sort of documentation together.
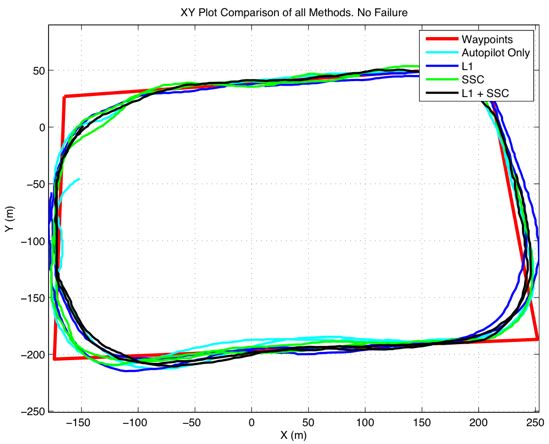
Just a side note, here is a plot (again from flight tests) comparing several of the failure tolerance methods perform under no failure (to use a baseline when compared to failures).