
The SLUGS autopilot is heavily geared towards research in small to medium sized UAVs. Great care has been taken to assure that it has enough processing power for moderately complicated control tasks and at the same time is easily reprogramable via Simulink. This effectively allows to rapidly iterate from simulation to implementation with no intermediate coding.
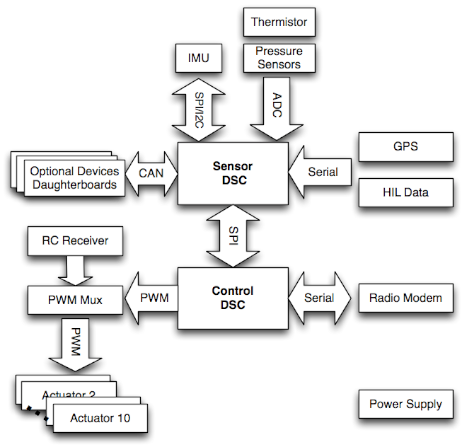
The developed architecture physically decouples sensor integration and INS filtering from the control algorithm and communications by using two 33Fj256MC710 dsPIC Digital Signal Controllers (DSC) interconnected via a high-speed Serial Peripheral Interface (SPI) bus. The SLUGS autopilot has been designed to be modular and extendable in order to extend the sensor and peripheral suite as the need arises via CAN bus daughterboards.
To facilitate the development cycle, the SLUGS autopilot also includes a way to perform Hardware-in-the-Loop simulation either by replaying flight collected data or from a 6-Degree-of-freedom model directly in Simulink.
The developed architecture physically decouples sensor integration and INS filtering from the control algorithm and communications by using two 33Fj256MC710 dsPIC Digital Signal Controllers (DSC) interconnected via a high-speed Serial Peripheral Interface (SPI) bus. The SLUGS autopilot has been designed to be modular and extendable in order to extend the sensor and peripheral suite as the need arises via CAN bus daughterboards.
To facilitate the development cycle, the SLUGS autopilot also includes a way to perform Hardware-in-the-Loop simulation either by replaying flight collected data or from a 6-Degree-of-freedom model directly in Simulink.
The SLUGS autopilot is able to control up to 10 servos via PWM commands and has a built in multiplexor to switch between automatic and pilot control. It communicates with the ground station and the Hardware-In-the-Loop simulator via a communications protocol that currently supports 23 different sentences. These sentences include attitude, position, raw sensor readings, pilot control commands and many more.