
The Ground Station Software has been developed to decode the incoming telemetry messages from the SLUGS AP. It also works as a Hardware-In-the-Loop interface to Simulink and is the central point to configure the Autopilot.
Currently it has the following features:
Currently it has the following features:
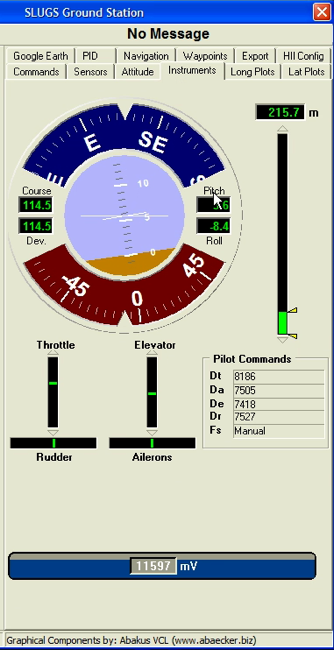
- Graphical instruments. It displays pilot console commands, attitude, barometric height and battery level.
- Data Plots. Show real-time data plots of commanded VS. Measured plots in the lateral and longitudinal channels.
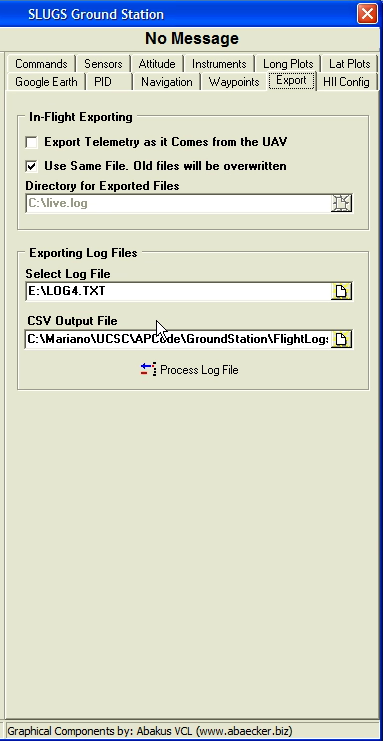
- Export/Decoding. Exports the telemetry sentences as they are received from the SLUGS AP to a csv format ready to be imported in Matlab for plotting or offline analysis. It can also decode and export recorded telemetry from the onboard data logger.
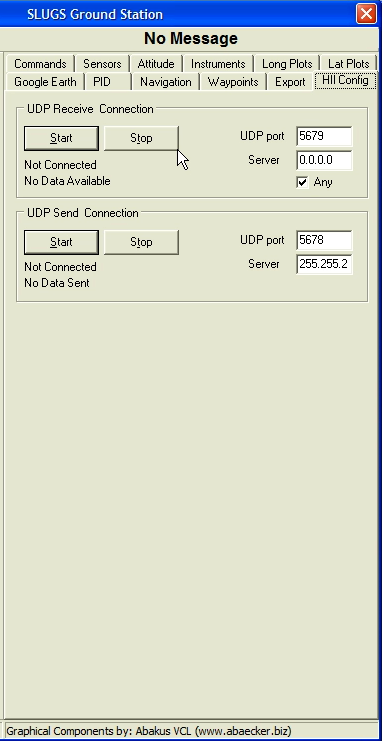
- Hardware-In-the-Loop. It configures the UDP port and IP address to communicate with the Simulink HIL simulator.
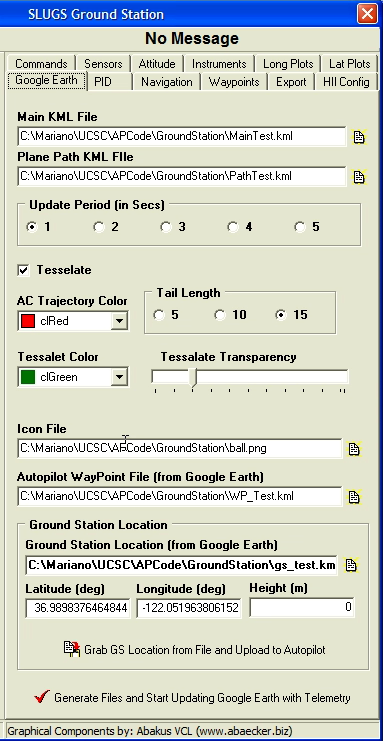
- Google Earth Configuration. Configures how the ground station software interacts with Google Earth to display the UAV trajectory. You can choose colors, icons and refresh rate of the UAV trajectory.
- Telemetry. Display all the telemetry sentences in numeric format.
- Google Earth Plot. Soft real-time Plotting of the UAV trajectory in Google Earth.
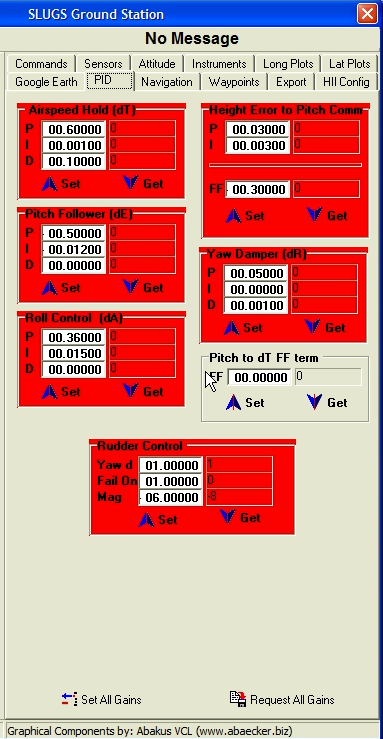
- PID Configuration. Configure all the PID gains for the autopilot.
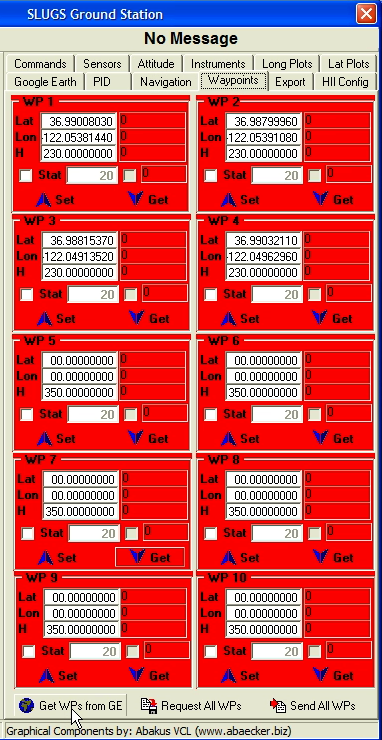
- Waypoints. Read the waypoints from a Google Earth file and upload them to the autopilot.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}